(二)带有锥形盘无级变速器的送经机构
带有锥形盘无级变速器的送经机构有多种形式。其基本结构是含有能作变速传动环节的减速轮系,并且在轮系中有一对蜗杆蜗轮副,以防止经纱张力产生多余送经。它们有的使用张力弹簧,有的使用张力弹簧和张力重锤,有的采用活动后梁作为感应元件,用以感应织轴直径的变化,维持恒定的送经量。
亨特式送经机构即是其中常见的一种形式,如图1—19所示,主轴转动时,通过传动轮系 (图中未画出,传动比为i1,)带动无级变速器的输入轴9,然后经锥形盘无级变速器的输出轴20、变速轮系21、蜗杆19、蜗轮18和齿轮17,使织轴边盘送经齿轮22转动,允许织轴在经纱张力作用下放出经纱。这是一种连续的送经机构,避免了间歇送经对机构的冲击,调节细致均匀,因此适用于高速;然而其结构较复杂,对零件的精度和材料的要求较高。这种送经机构现在广泛应用于剑杆织机上。
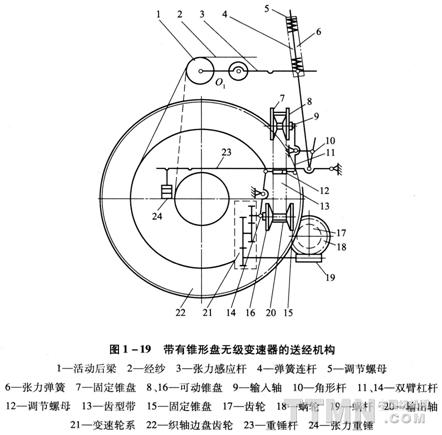
该机构的经纱调节原理如下:活动后梁1检测经纱2的张力,当织轴直径变小或其他原因使经纱张力增大时,就迫使后梁偏离原来的平衡位置向下摆动,经张力感应杆3使弹簧连杆4提起,弹簧连杆4以张力弹簧6支撑在张力感应杆3上的凹槽中,其下端同时铰连着重锤杆23和角形杆10,经角形杆10可使双臂杠杆11作逆时针方向转动,将输入轴9上的可动锥盘8推向固定锥盘7,迫使齿型带13上移,上锥形盘的传动直径D1,随之增大,同时通过调节螺母12和双臂杠杆14,拉动可动锥盘16离开固定锥盘15,因而下锥形轮的传动直径D2相应减小,使无级变速的传动比减小,织轴转速加快,送经量增大,于是经纱张力得到调节。反之,经纱张力减小,则机构作用相反。经纱的上机张力由张力重锤24产生,改变其重量和力臂以及弹簧连杆4压在张力感应杆3上的位置即可调节上机张力。5为调节螺母。
该机构织机主轴每一转送出的纱线长度为:
Lj = i1i2i3η(D1/D2)πD
式中:i1——织机主轴到输入轴9的传动比(定值);
i2——变速轮系的传动比;
i3——蜗杆19到织轴边盘齿轮22的传动比(定值);
η——无级变速器中齿型带与锥形盘的滑移系数;
D1——输入轴9上锥形盘的传动直径;
D2——输出轴20上锥形盘的传动直径;
D——织轴直径。
变速轮系21的四个齿轮为变换齿轮,改变变换齿轮的齿数,可满足不同的纬密要求。在变速轮系所确定的某一个送经量变化范围内,通过改变无级变速器的速比,又可在这一范围内对送经量作出细致、连续的调整。
综上所述,机械式送经机构的一般工作原理是用活动后梁或其他检测件来感应经纱的动态张力,后梁的摆动、或其他的感应信息经适当处理后,去控制织轴传动系统的传动比,调节经纱送出量,从而维持经纱上机张力或动态张力的恒定。其送经量可看作由两部分组成:一是由织物品种所决定的每纬基本送经量,二是由经纱张力波动决定的送经修正量。经纱上机张力和织物品种决定了后梁的平衡位置和其他调节件的初始状态;对于机械送经,相对于逐渐变小的织
轴直径,后梁不断有新的平衡位置,由此控制送经量的基本部分;而张力波动引起后梁系统相对平衡位置的摆动,则对应送经量的补偿修正部分。
二、电子式送经机构
随着现代织机技术的日渐提高,无梭织机在自动化、高速化等方面的发展也越来越快,这就要求织机各机构之间的联动配合要进一步加强,精度更高,反应更加灵敏准确。机械式送经机构的不足之处日渐明显。由于机电一体化技术的迅速发展,电子送经机构在无梭织机上的应用越来越多,它具有结构简单、反应灵敏、调节准确、操作方便、可实现微机集中控制等特点,充分体现了机电一体化的优势。电子送经装置一般是运用非电量电测的方法采集经纱张力信号,以电子或微机技术对信号加以处理后,对单独的送经电动机进行控制、调节,驱动织轴送出经纱,并维持经纱张力的恒定。电子送经装置一般有电子送经电动机、减速箱、张力信号采集系统、控制系统组成。
根据经纱信号采集系统的工作原理,电子式送经机构通常分为接近开关式和应变片式两种方式。
1.接近开关信号采集系统
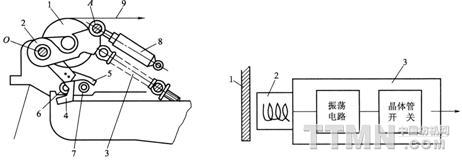
如图1—20所示,经纱9从织轴上退绕出来经过后梁1,经纱张力使后梁摆杆2绕O点转动,摆杆下面装有压缩弹簧3,调节压缩弹簧可以调节经纱的上机张力,并使后梁摆杆处于一个正常的平衡位置。织造中,当经纱张力增大时,摆杆下移,铁片4遮住接近开关6的感应头,接近开关6输出一个信号,送经电动机回转,放出经纱。当经纱张力过大时,铁片5下移遮住接近开关7时,接近开关7输出信号,命令织机停车,当张力小于允许范围时,铁片4上移遮住接近开关7的感应头,织机停车。
随着织造过程中经纱张力的不断变化,铁片4与接近开关6的相对位置也在不断变化,送经电动机时断时通,使后梁摆杆始终在平衡位置上下移动,经纱张力始终稳定在预设的上机张力附近。
在摆杆上方A点处铰接有阻尼器8,由于阻尼器的阻尼力与A点的运动速度平方成正比,所以,由于开口、打纬等运动所造成的经纱张力的大幅度高速度的瞬间波动不能引起阻尼器工作长度的变化,但对于织轴减小或某些因素引起的经纱张力的慢速变化,阻尼器不产生阻尼作用,不影响摆杆在平衡位置的上下运动。
接近开关是一种电感式传感器,其内部结构如图1—21所示。当铁片1遮住传感器感应头时,由于电感应使感应线圈2的振荡回路损耗增大,回路振荡减弱,当铁片遮盖到一定程度时,损耗大到使回路停振,此时晶体管开关电路输出一个信号。
这种电子送经形式经纱不是每纬都送出的,送经量的调节精度相对较差;机构的动态调节特性受弹簧的弹性系数、后梁系统的转动惯量、阻尼器的工作特性的影响;而且采集的信号是开关量,信号成分单调,不易得到相对准确的调节。但它的电路比较简单可靠,实用性较强。适合于中、厚织物的织造。
2.应变片式信号采集系统
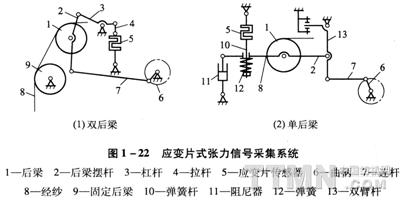
图1—22所示为应变片式张力信号采集系统。经纱8绕过后梁1,经纱张力的大小通过后梁摆杆2、杠杆3、拉杆4、使应变片传感器5发生变形,以采集经纱张力变化的信息。这种方式所采集的信号连续性好,控制部分易于处理。曲柄6、连杆7、后梁摆杆2可使后梁作有规律的摆动,以缓和织物开口运动中经纱张力的波动。
3.直接检测经纱或布面张力应变片式采集系统
应用于多尼尔和苏尔寿剑杆枳机中。
电子送经的电动机有采用步进电动机、开关磁阻电动机、无刷直流电动机或伺服电动机等不同形式,早期的电子送经亦采用力矩电动机。织机张力信号采集系统将张力信号传给控制系统,控制电子送经的电动机的转动,再通过减速箱传动经轴,实现送经,根据张力变化自动调整电动机的转速,保持经纱张力稳定。
|








