- 打印
- 字号
- 收藏
点焊专用机器人
盟立自动化科技(上海)有限公司
2011年09月27日 来源:中国纺机网编辑部
振动抑制控制减弱了机器人运动中的余振,提高了短步距移动时的动作性能,大大缩短了作业周期。
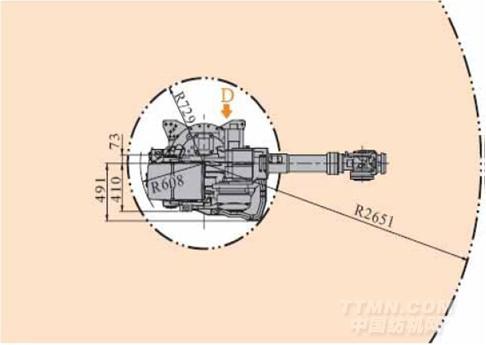
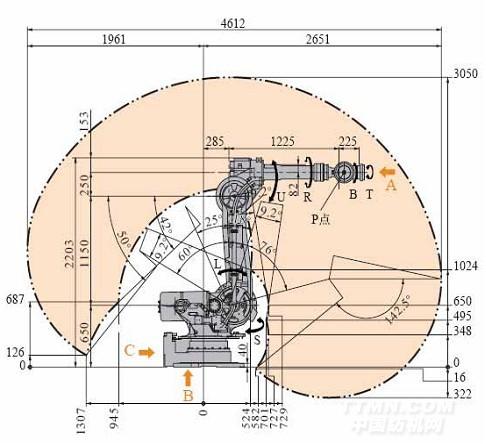
可控制的机器人动作范围
在本体回转轴上可以安装机械档块,并且可随时改变其安装位置,即使在外部电缆联接后也可进行。可动区域限位开关及可变机械档块可以安装在本体回转轴上、上臂轴及下臂上。
灵活性得到提高腕部许用惯量的提高,使设计者可以选择最适合待焊工件的点焊钳。DX100 可同时协调控制多达36 个轴,可以实现机器人(6 轴)+气动点焊钳(1 轴)+行走轴(1 轴)组合的四台点焊机器人单元的同时协调动作。并且,由于控制柜命令的运行速度与旧机型相比提高1 倍,从而缩短了作业周期。
重大改进后的高性能机器人控制柜DX100 可实现高质量点焊机器人系统
运用高精度轨迹控制算法缩短了对命令响应的滞后时间,它是安川独有的“高级机器人动作(ARM)”控制特点之一。因此,机器人的轨迹重复精度可提高50%。气动点焊钳的挠曲补偿精度得到提高,焊钳焊接时可以工件有微小偏差。借助这种功能可以减小由于加压后使电极臂挠曲而引起的实际打点位置与工件定位位置的偏离。