- 打印
- 字号
- 收藏
IPE100系列工程型变频器
深圳市英威腾电气股份有限公司
(4)系统四象限运行分析
电机正转,电机的输出转矩通过减速机转换后作用在皮带机的驱动轮毂上,并与上层皮带自重沿传输面重力分量作用在皮带机驱动轮毂上的 力矩组合,电机工作在第一象限。当皮带上煤后,煤的重量沿皮带传输方向的分力也作用在驱动轮毂上,并使驱动力矩逐渐增大,当驱动力矩超过摩擦力力矩后,驱动轮毂的转速将加速转动,通过机械连接使得电机转子也加速转动,其速度超过电机的同步转速;此时电机处于反转再生状态,电机工作在第二象限。当电机反转时,则工作在第二、四象限。
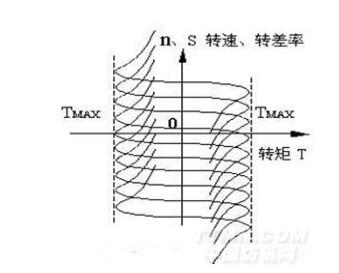
电机运行在第一、三象限时为电动态,其定子中的旋转磁场、电机的输出电磁转矩与转子的转向同向,电机输出的电磁转矩是转子的驱动力矩,此时电机从电网吸收的电能大部分有电磁转矩作用到转子上以机械能形式输出。当电机运行在第二、四象限时为再生态,由于转子切割磁力线的方向发生了改变,故电机作用到转子上的带电磁转矩方向也发生改变,成为转子的制动阻力力矩;此时电机转子被负载的合成力矩拖着以超过同步转速的速度转动,负载作用在皮带机的驱动轮毂上的机械能有电机反馈回电网。变频器驱动三相异步电机工作在四个象限的示意图如下:
五、调试注意事项
1、整流器电压环PI参数调节
当变频器在现场安装后,由于现场电源侧变压器的电感等原因,变频器的PWM整流可能会出现以下情况:
(1)整流器运行输出过电压(OV),当出现过电压时适当降低电压环比例系数和积分系数,增大比例系数KP可加快电压的动态响应,但KP过大容易产生振荡。增大积分系数KI可加快电压的动态响应,但KI过大会导致电压超调且容易产生振荡。通常先调节比例系数KP,在保证系统不振荡的前提下尽量增大KP值,然后调节积分系数KI,使系统既有快速的动态响应又超调不大。
(2)整流器运行输出电压波动大,此时适当降低电压环动态比例系数和动态积分系数。
(3)整流器运行过电流(OC),此时可适当调低电流环比例系数和积分系数。通过对电流环的调节改变有功电流分量和无功电流分量的动态响应。增大比例系数KP可加快电流环的动态响应,但KP过大容易产生振荡。增大积分系数KI可加快电流的动态相应,但KI过大电流超调且容易产生振荡。通常先调节比例系数KP,在保证电流不振荡的前提下尽量增大KP值,然后调节积分系数KI,使系统既有快速的动态响应又超调不大。
2、抱闸与松闸的控制,抱闸系统的开闸信号由集控系统给出,开闸后反馈信号给集控系统,变频器起车;停车时集控系统给出停车信号变频器减速,当变频器到0Hz是继电器输出信号,抱闸系统抱闸。
3、整流与逆变的起、停车顺序,启动时集控系统先给整流器起车信号,整流起车后延时5s给出逆变起车信号,逆变起车;停车时,逆变减速到0Hz,运行继电器输出信号停止后整流停车。
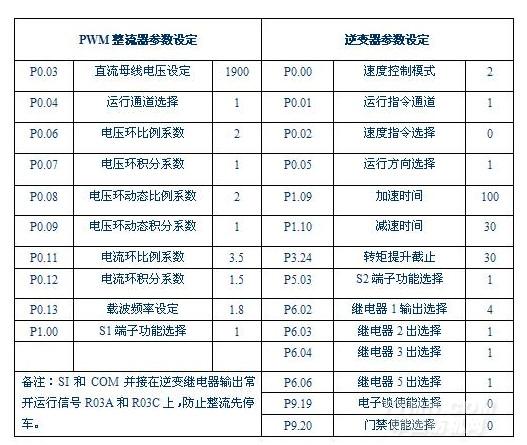
六、变频器参数设定