| 控制系统:
喷水织机的控制系统,与其他无梭织机功能大致相同,主要是为了保证喷水织机的正常工作,完成喷水织机的快速启动,定位制动,故障检测,电子储纬,电子送经,电子卷取等任务。
现代喷水织机控制系统,通常采用以下形式:
继电器控制系统;PLC控制系统;单片机控制系统等。
依照机型分类,大致为:津田驹系列,包括引春机型;丰田系列,即原尼桑机型,包括沈阳纺机机型。其中单片机控制系统使用较多,PLC控制系统亦占有一定份额。
喷水织机的控制系统,一般具有CPU芯片及显示系统,可以与车间的中央微机联网;显示、统计并打印各台织机的主要运行数据;可以对织机本身的运行状态进行显示、监测,方便了喷水织机的生产管理。
一、概述
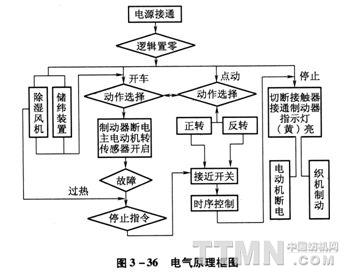
喷水织机控制系统通常以CPU为控制中枢,将织机的准备、运转、正转、反转、停止、定位制动以及各种故障检查(主要包括:经纱超张力、左右绞边、前后废丝、定长、纬丝检测等),通过分析处理后,通过执行元件进行控制。
PLC控制系统是以PLC可编程序控制器为控制中枢,将前述的指令信号及检测信号送人PLC的输入端,由PLC分析处理后发出执行指令来进行控制的。
喷水织机电气框图如图3—36、图3—37所示。
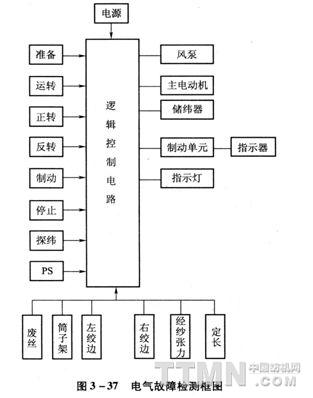
控制系统主要包括织机传动与制动、织机故障检测、纬纱探测、逻辑控制、电子储纬、电子送经、电子卷取等部分。
(一)织机传动
喷水织机因其引纬系统简便、经纱原料强度较高的特点,所以其转速高,对主传动电动机的要求也较高:较高的启动转矩以及快速制动的反向扭矩,同时要考虑频繁的正反向点动带来的频繁启动冲击电流等。
由于独特的工作环境(工作环境湿度大),故对电动机提出了很高的绝缘性能及密封性。喷水织机电动机必须具有较高的启动转矩,以满足织机的初始打纬力,避免织布纬疵。为了满足织机的快速制动,电动机的转子必须可以承受较大的扭矩。
主传动电动机内部附有温度开关,进行过热保护。
主传动电动机必须定期添加润滑脂,以保证正常运行。
为了保证织机正常启动与运行,主传动电动机轴头一般都为锥形。机型不同,其锥度有所不同。在使用中或更换皮带轮时,一定要保证皮带轮与电动机轴有足够接触面。
为了保证喷水织机足够的启动转矩与工作转矩,主电动机皮带必须具有足够的张力。通常使用直压式张力仪称进行皮带张力检测。
为了保证良好的织物质量,喷水织机必须做到精确的定位制动。喷水织机的制动包括电磁制动器的电磁制动以及主传动电动机的反接制动。
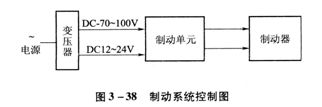
喷水织机制动系统必须保证打纬轴停止在170°±20°的范围之内,并且保证停在断纬指令发出后的第一纬。制动系统由电磁制动器、电源及控制回路组成。如图3—38所示。
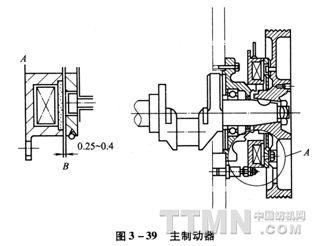
喷水织机普遍采用单片式电磁制动器(3—39)。由动片(金属摩擦材料)与静片(表面为非金属摩擦材料,内部并埋有线圈)组成。其结构简单、使用方便。电磁制动器按线圈种类分为单线圈与双线圈两种形式。沈阳宏大纺机公司(沈阳纺机厂)及丰田公司(即原尼桑公司)生产的喷水织机使用单线圈式电磁制动器;津田驹及引春公司生产的喷水织机使用双线圈式电磁制动器,即高压线圈与低压线圈。
织机使用的电磁制动器其制动力矩一般在160~350 N•m之间。当织机的转速越高、门幅越阔时,其所需的制动力矩越大。
电磁制动器使用时必须做到两个基面平行,且间距保证在0.25—0.4 mm之间。使用时切忌两个摩擦面沾染油污尘埃。
织机使用中,要经常检查制动器间隙,并进行调整,以保证正常运转。
电磁制动器在使用中,其引线不可接地,以免烧坏输出功率管。zw型喷水织机制动器引线不可颠倒接线,其极性不可改变。
(二)故障检测及自停装置
喷水织机设有多处故障检测及自停装置,以保证织机的正常工作。其主要作用如下:
(1)左右侧绞边自停:安装于织机两侧绞边线轴旁。当绞边纱线断后,导纱钩依靠弹簧力使工艺触点动作发出停车指令。通常采用电刷式工艺触点或无触点开关,如干簧管、光电开关、接近开关等。
(2)经纱超张力自停:安装于织机左侧后部,由松经臂控制。当经纱张力过大时,发出停车指令。通常采用微动限位开关。
(3)废丝筒子断头自停:安装于织机右侧后部,由导纱钩控制。当废丝绞边筒子纱断掉时,导纱钩动作发出停车指令。通常使用导纱钩式工艺触点。
(4)废丝自停:安装于织机右侧前部,由杠杆控制,当废丝断掉时,杠杆动作,接通相关触点,发出停车指令。通常使用霍尔开关或工艺触点。
(5)定长自停:安装于织机计长表内部,当织物达到预定长度后,发出停车或落布指令。若使用机械计长表,则使用微动开关发讯;使用电子计长表时,则直接发讯。
(6)其他自停:除去上述的故障检测之外,大部分喷水织机还具有以下故障检测(不属于工艺自停)。
①主电动机及风泵电动机内部温度开关(电动机过热保护),当电动机过热后,自动停车。
②制动器内部温度开关(电磁制动器过热保护)。
(三)纬纱探测
喷水织机的纬纱探测,通称“探纬装置”,主要有以下三种形式,广泛采用的是后两种形式。
(1)机械式探纬装置:其工作原理同有梭织机的“鸡啄米”式探纬器,利用其弹簧及杠杆的工艺触点进行探测,主要使用于捷克喷水织机。
(2)触指式探纬装置:其工作原理是利用探纬单元产生的高压直流供给探纬器触指;当触指与含水的纬丝相接触时,水及纬丝将探纬电路接通,产生一个有纬丝的信号;如无纬丝,则无此电信号,即输出纬停车信号。
根据触指式探纬器的安装及结构不同,分为“上置式探纬”与“下置式探纬”两种。
上置式探纬直接安装于钢筘顶部,可以很方便地安装、调整及更换;因其分体结构、可以局部更换,维修费用小。其缺点为不适应高速运转,故近年来日趋淘汰。
下置式探纬为整体结构,直接安装于打纬轴上,其探针与引出电缆使用工程塑料密封。因其与钢筘无机械连接,故刚性较好,探纬可靠性高。近年来,由于光电探纬的应用,下置式探纬使用范围逐渐缩小。
(3)光电式探纬装置:其工作原理是利用纬丝遮断光源时改变光电信号的电平变化进行有无纬丝的探测。通常采用砷化镓红外光源及光电管组成光电检测电路,织造时纬丝喷射至预定位置,当其进入光电检测区域后,遮断光源,使检测电路中产生“有纬丝”的信号;如无纬丝,光源不遮断,检测电路中出现“无纬丝”的信号。
光电式探纬装置的主要特点是适应品种面广、不受水质影响、抗干扰能力强等。
光电式探纬装置由光电传感器及引线、控制单元与安装支架组成。
光电式探纬装置安装时,要确保其底部及左右面不与钢筘及筘座碰撞,其检测口上部与经丝位于同一平面。要保证纬丝飞行时能够准确进入光电式探纬装置检测口。调整方法为将织机手轮调至0°,观察织口的纬纱是否进入光探装置的检测点。
光电式探纬装置前后位置的调整方法为:使纬线与光探检测点之间间隔在15 mm左右,并使纬线在手轮310°~340°进入光探装置的检测点。
光电式探纬装置的调整,要首先将织机的引纬调至最佳状态、剪刀调至最佳状态。要保证剪刀剪断纬纱后,保留2~3根未剪断。
光电式探纬装置由探头和控制单元组成。
探头由光导纤维、红外光电发射管、光电管及电路组成,在织机工作时,纬丝进入检测点,在此过程中,将光电信号转换成为电信号,送至控制单元。控制单元将纬丝检测信号进行处理及放大,从而判断入纬是否正确,从而发出相应的纬丝信号至织机主控板。
探头引线:电源(正)、电源(负)、信号。
控制单元引线:+12V、纬丝信号输出(F)、同步信号输入(FtIR)(PS)、同步信号输出(Ft或PS′)、停车信号输出(STOP)、电源OV。
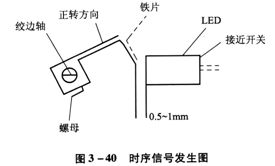
(四)时序信号
喷水织机的时序信号一般采用接近开关或光电编码器控制。目前大部分喷水织机都是使用接近开关。
时序信号又称PS信号。该装置位于右墙板外侧,利用与织机主轴同步的绞边轴同时旋转的感应片,每转与接近开关接触一次,使其在预设的角度发出基准信号。此基准信号是各种动作的基本信号,尤其是在探纬电路中,以此信号来判定纬纱有或无,从而决定织机的工作状态。所以感应片的角度调整极为重要。使用中务必将感应片调整至290°~320°与接近开关接触,并要注意两者的间隙为O.5—1mm。如图3—40所示。
部分喷水织机使用光电编码器作为时序信号,安装及使用中要注意光电编码器的零度校正。
(五)操作装置
喷水织机的操作装置由安装于织机左右两侧的按钮盒组成。左侧的按钮盒包括全部按钮,由准备、运转、正转、反转、停止及刹车按钮组成。右侧仅设置有运转、正转、反转、停止按钮。ZW系列的喷水织机不设运转按钮,由正转按钮兼代:在准备按钮不动作时,按动正转按钮则织机正向点动;在准备按钮动作后,织机则转为运转状态。
LW系列(含GD767、JWG4762)喷水织机左侧的按钮盒安装有织机工作状态显示,它可以显示织机的工作状态及故障停车的原因。其显示为:
经纱张力 废丝后
左绞边 右绞边
预备 废丝前 长度
国内生产的喷水织机普遍采用的两种按钮盒的形式如图3—41、图3—42所示。两种形式刹车按钮的功能略有不同,ZW型的刹车按钮若不复位,则织机不能进入准备状态,而LW型则可以直接进入准备状态。
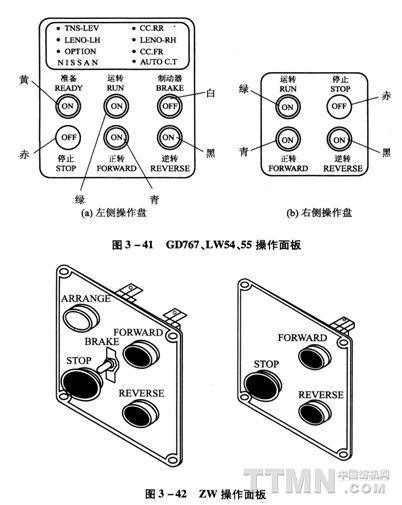
ZW型操作按钮结构简单、价格低廉,但功能相对较少。
Lw型操作按钮可靠性、防潮性均好,但结构复杂,价格较高。
(六)电控箱
电控箱是喷水织机控制系统的心脏。织机的各项参数全部送人电控箱,电控箱将讯号进行分析处理,保证织机的正常工作。
电控箱内设置了各种保护电路,如控制回路的短路保护、过电压保护、过电流保护等。电控箱的控制回路通常由电源电路、逻辑处理电路、探纬电路、刹车控制电路等组成。有些厂家的电控箱内还包括了电子储纬系统、电子送经系统。
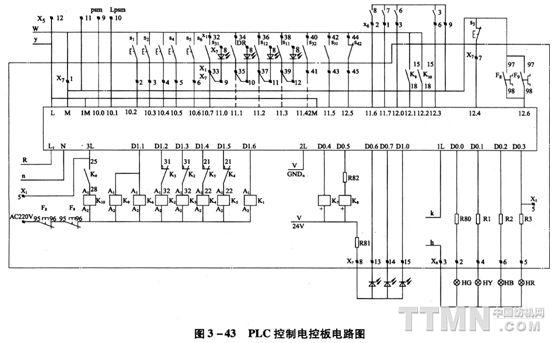
现在国内生产的喷水织机电控箱有以下几种:
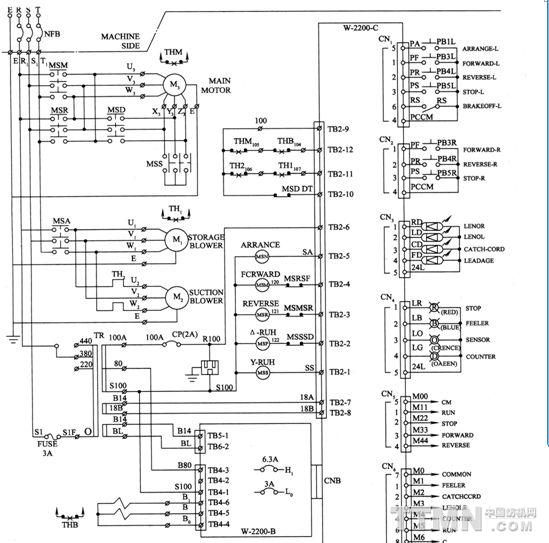
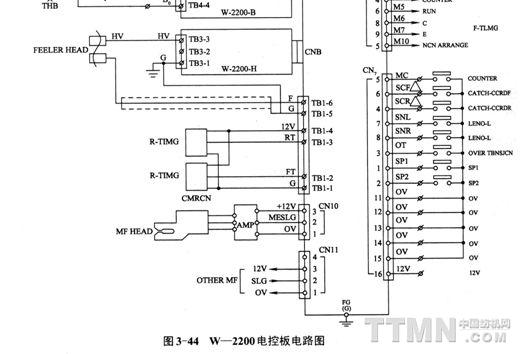
LW541式电控板;LW52式电控板;W—2200电控板(日本北越生产),目前国内生产的很多电控板都是类同北越电控板;PLc控制电控板。PLC控制电控板电路图见图3-43,w-2200电控板电路图见图3—44。
近年来,IRO公司又推出新的带中文终端的电控板。它的电控板的各项参数均可由中文终端设定并调整。
二、工作原理-
W-2200电控板电路图见图3—44。织机接通电源后,各变压器及逻辑控制单元通电,做好开车准备。当按下“READY”(准备)按钮后,除湿风泵及储纬风泵(对SR、RD测长而言)开始运转,为开车做好准备;对于电子选纬系统,其电源及备纱系统也开始工作。当“RUN”(运转)按钮接通时,织机主电动机瞬时启动,织机开始运转,探纬单元及其他故障检测单元亦开始工作,对织机工作状态进行监测。当遇到下列任一种情况时:探纬单元发出缺纬信号、故障检测单元发出故障信号、按钮发出停止指令、电子选纬发出缺纬信号等,控制单元通过执行元件使主电动机停止运转、电磁制动器通电,迅速定位停车。
停台时,按下喷水织机在不按准备按钮时,可以直接进行“点动正转”或“点动反转”的操作,“正转”或“反转”点动的操作,可以进行点动步幅的调整。同时对于“反转”的操作,可以进行“反转一周”的选择。
停台时,按下喷水织机的“BREAK”(制动)按钮,可以解除制动(刹车),便于人工转动机器进行调整。ZW系列织机操作系统不设置“RUN”(运转)按钮。其运转的操作,是直接使用“FORWORD”(正转)按钮完成的(在准备钮工作之后,按正转钮即为运转;不按准备钮,直接按正转钮即为点动)。
织机的定位停车及故障检测、纬纱探测等都通过接近开关或角度传感器(光电编码器)作时序控制。
织机的定位停车,由制动单元、电磁制动器来完成。
1.LW系列电控板工作原理
LW电控板使用HD64180 CPU作为中央控制,织机的信号处理及分析均由它来控制,主要控制程序存放于存储器27256。其控制软件由主控程序模块及中断服务程序模块组成。织机开机后,计算机立即从输入口输入监测信号,然后判断处理。
LW系列逻辑单元(主控单元)直接控制电动机的各种工作状态(启动、停止、制动),并随时监测各处工艺触点的现时状态,做出相应对策。
逻辑单元设置有:主电动机超力矩时间调整;反接制动时间调整;点动时间、方式、间隔时间调整;制动时间调整;计长方式选择。
信号综合处理及输出控制包括了探纬故障、LP信号后沿故障、HP故障等。当探纬信号正常时,在PS工作区域内,LP5产生由高电平至低电平的负脉冲;在探纬信号异常时,LP5则会出现固定的高电平。此信号通过电路输出与同步时序信号综合后,由反向驱动器输出至F—OUT点。当出现故障时,此点输出一个负脉冲。
积分电压综合处理:本单元的LP4信号提供给比较电路,又提供给信号综合的输出电路,其作用是显示积分调节状态。其中前一部分为风值检测电路,同时提供积分比较电压。正常时,积分电压显示管常亮;当电压过高时,此发光管闪烁;停车时,无积分电压,则发光管熄灭。
2.ZW系列电控板工作原理
ZW系列电控板以逻辑控制电路为核心,使用CPU控制,其接受及检测各种指令及工作状态,进行逻辑分析判断,决定织机以后的状态。
电控板的大部分运行状态监测信号的输入及输出电路均为光电耦合形式接人。电控板内的多个钮子开关可作为各种工作状态的选择。电控板内可作下列调整:纬纱信号输人延时及判断延时;制动延时;寸动时间调整;反转时间调整等。
3.PLC电控板工作原理
PLC电控板使用可编程序控制器作为织机逻辑控制的核心,以此接收及检测各种操作指令及工作状态,将其进行处理后,以其输出点控制驱动元件来实现织机工作状态。
PLC电控板所有的输入、输出点均有LED显示,使用时,可以方便地观察各处工作状态。
PLC电控板利用可编程序控制器上的内置电位器可以做以下调整:启动时间;送经延时时间等。
4.探纬电路原理
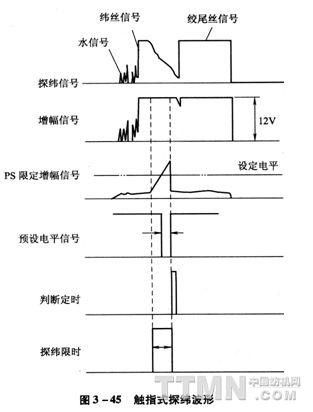
(1)触指式探纬原理:织机运转时,水流及含水的纬丝与探针接触,由于水的导电性,使一定的电流由高压侧探针流向低压侧探针,从而使探纬器信号处理单元接收到所需的纬丝信号。这里接收到的信号包括:纬丝信号、水信号、纬尾信号及漏电信号。探纬信号处理单元就是将此混合信号加以处理,滤去无用信号,保留并放大纬丝信号。信号处理单元利用PS信号进行时段控制,将放大整形后的探纬信号进行计数比较,然后输出工作指令。探纬接收到的波形如图3—45所示。
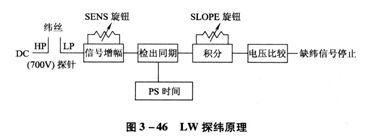
LW系列探纬原理如图3—46所示。
ZW系列探纬原理如图3—47所示。探纬电路一般由以下部分组成:输入信号、状态监测信号、整形电路、积分电路、比较电路、处理电路及输出电路等。
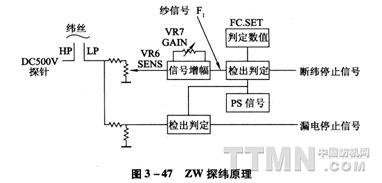
输入信号主要包括:探纬信号(LP)、时序信号(PS)、缺纬模拟信号(OPT)、高压电源信号(HP)、状态监测信号。
信号处理:探纬信号经过处理后,组成一个新的信号提供给末级的信号综合。这里主要包括了整形电路、检出电路、积分电路与比较电路。
(2)光电式探纬原理:光电探纬的光探波形图如图3—48所示。
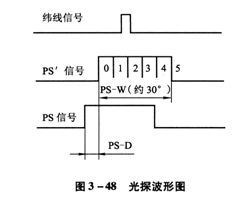
①纬丝信号:由光探头的前后调节位置(310°~320°)进行变化。此光探信号变化较大时,说明投纬不稳定。
②PS信号:PS信号的起始基准位置由PS—D电位器进行改变。PS信号的幅度由PS—w电位器进行改变。
③PS信号:基准为290°。
织造时当纬丝进入光电探纬的检测区域后,遮断光源,使检测电路中产生“有纬丝”的信号即有PS信号;如无纬丝、光源不遮断,检测电路中出现“无纬丝”的信号,即无PS信号输出,与PS信号比较后发出缺纬停止信号。
三、电子储纬装置
电子储纬装置可以依照事先设定的数据将纬丝缠绕在测长鼓上,并定量放纬。本装置由储纬量控制,测长控制,纬丝选择控制、压纱器控制,转向水阀控制及补水阀控制组成。
(1)储纬量控制:为了防止织机起动时纬丝储存不足的现象,要预先卷绕必要数量的纬丝。
(2)测长控制:使用电信号控制电磁阀(指棒)的吸合及断开来控制每一纬的纬丝长度。
(3)纬丝选择控制:由纬丝选择指令装置,进行二色或三色纬丝的选择指令,进行纬丝的选择。
(4)压纱器控制:由终端控锚,按照预设的角度,将纬丝夹紧或放开。
(5)转向水阀控制:同纬丝选择控制,与选色同步。
(6)补水阀控制:织机停止后,手动或自动为水泵补水。
电子储纬装置通常由储纬头、控制箱、预置器及手动开关组成。详见图3—49。
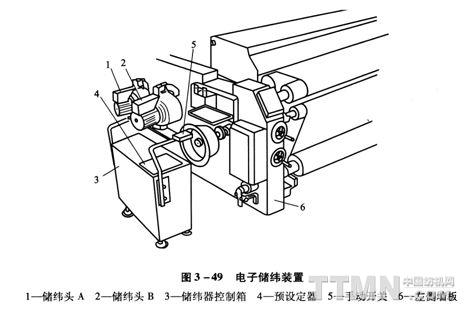
目前国内喷水织机一般配置的大多是春日储纬器(PAW)、ROJ储纬器(IRO)。近年国内不少生产厂家也推出了自己的产品,但基本模式仍为以上两种。下面对两种储纬器分别介绍。
1.PAW储纬器
其储纬头外形及结构如图3—50所示。
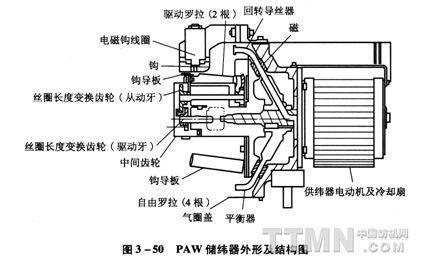
图中所示的储纬器为标准结构,亦称罗拉式。它由2根驱动罗拉及4根自由罗拉组成。其中自由罗拉可以用作卷绕长度(备纱长度)及卷绕张力调节使用,改变自由罗拉的径向尺寸或角度,便可方便的适应各种不同纤维或不同的门幅。
罗拉式储纬器用于加捻丝时,具有明显的优势。
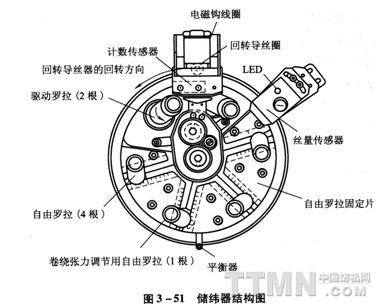
图3—51为罗拉式储纬器的结构。
储纬头的动作,应与织机的启动与停止同步。当织机启动后,运转至喷嘴出水的角度时,储纬器的指棒(电磁钩)抬起,同时压纱器也松开,喷嘴内的水流将纬丝带出,完成引纬过程。当纬丝飞行到头后,指棒放下,压纱器闭合,避免纬丝松弛。这里指棒与压纱器的吸合或断开都与织机的运转角度有密切关系。所以储纬器必须要求织机提供运转信号及基准信号,A储纬器信号、B储纬器信号。上述信号一般使用三只接近开关控制。其安装调试方式见图3—52。
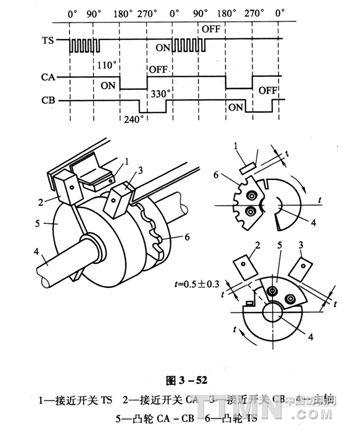
接近开关的调整:颜色转换信号由接近开关TSl、CA2、CB3输出。
TS为定时基准用开关,CA、CB为颜色切换用接近开关。
接近开关与凸轮的间隙调整为0.5±O.3 mm;
凸轮一旦靠近接近开关,其相对应的LED灯亮。
储纬器的操作,包括指棒、压纱器及旋转阀等的参数设置或修改都在储纬器控制箱上的预设器上操作。
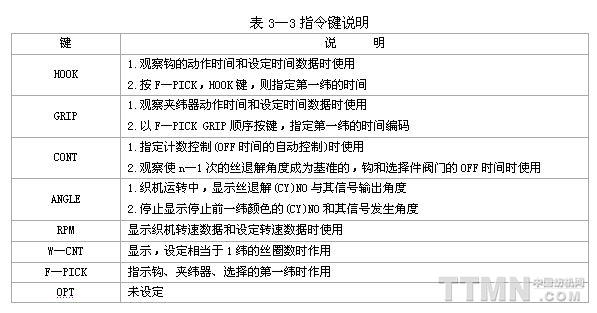
预设器上有指令键、颜色数据设定键、基本键等3种,计30个。
指令键的说明见表3—3。
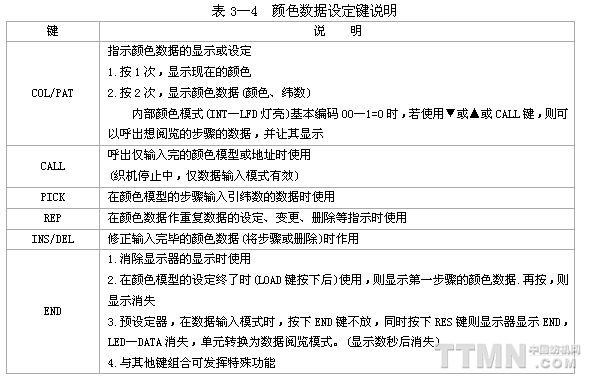
颜色数据设定键的说明见表3—4。
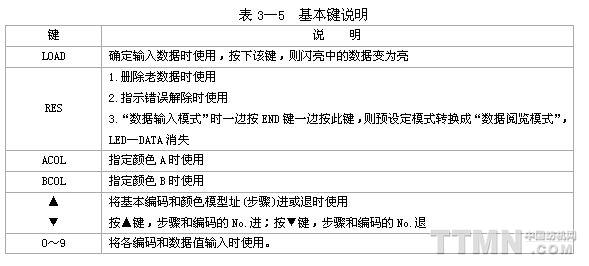
基本键的说明见表3—5。
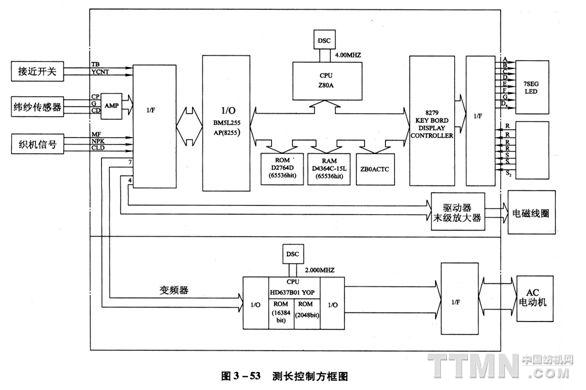
PAW储纬器的控制方框图见图3—53。
2.IRO储纬器
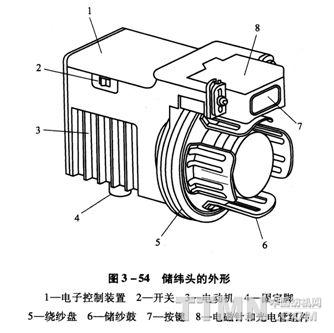
TD S/Z是纱圈间隙分开的纬纱储存器可以安装在喷气式和喷水式织机上,其适用纱线范围广。从20 dtex(细纱)到120 tex(粗纱)不等。它按要求的纬纱长度放纬。其储纬头的外形见图3—54。
IRO储纬器具有的功能:
(1)绕纱盘可设定为S向或Z向转动,这取决于纱线的捻向。
(2)纬纱储存成分开的纱圈且分纱间距可调[注意:纱圈的间隔可设定在0.7 mm(最小直径的储纱鼓)和2.2 mm(最大直径的储纱鼓)之间]。
(3)释放的纱圈用光电管检测。
(4)纬纱长度的调节[LENGTH]是通过调整储纱鼓直径和设定要释放的纱圈的数量来预置的(纬纱长度的范围:64—520cm)。
(5)建立到织机控制盘的双向通讯。直接通过织机控制盘设定工作参数或通过Roj手持终端设定。
(6)通过装在super Elf里的光电管或Roj TFE4纱线检测器,可以在输入处控制断纬时的动作。
(7)织机停机功能。
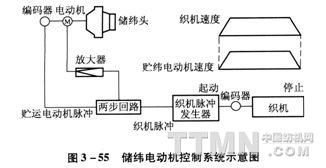
储纬电动机控制系统示意图见图3—55。
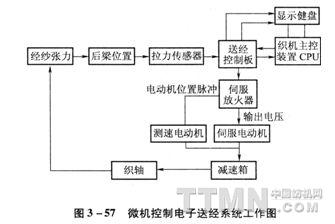
四、ELO—电子送经系统
喷水织机的电子送经机可以根据织物的张力及纬密与卷取机构配合,在织造过程中,同步送出设定长度的经纱,从而保证经纱系统恒定的张力,来圆满地完成织造。
电子送经一般由张力检测部分、控制部分及传动部分组成。
(一)张力检测部分
一般由织机后梁、张力检测器及计算机组成。当后梁摆动使张力杆位移,从而使张力传感器受到压力。张力传感器将张力杆的变形力转变成为与经纱张力相应变化的电信号,并将其信号输入至计算机。计算机将采集到的若干信号处理后计算出张力平均值,并将此值与张力预定值进行比较,作为下个周期的送经依据,从而决定织轴的转动量。
(二)控制部分
一般由上述的计算机及伺服驱动器组成。计算机的显示屏可以显示送经系统的实际张力数据及张力设定值等,并可用键盘进行相应的数据设定及修正。
伺服驱动器在接收到计算机的指令后,将信号处理,把计算机送出的信号放大成与之对应的功率信号,来驱动伺服电动机,从而完成对送经执行机构的控制。
当经纱张力过大或过小时,控制部分立即发出报警讯号及停车指令。
(三)传动部分
传动部分由伺服驱动的功率部件、伺服电动机与减速齿轮箱组成。它的转速及转向变化均由输入信号(即张力信号)的变化来控制。喷水织机的伺服电动机一般多采用交流伺服电动机,利用闭环控制系统来保证送经的线形特性。
(四)操作及使用
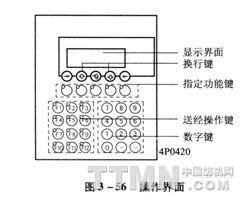
目前,国外的喷水织机已普遍配置了电子送经系统,如丰田与津田驹的各型号织机。国内产品中,沈阳宏大纺机公司生产的JWG4762型喷水织机的电子送经装置已开始应用。JWG4762型喷水织机电子送经装置的使用与操作主要利用了显示界面及操作键来完成。操作界面构成如图3—56所示。
1.功能说明
指定功能键:从左至右依次为送经监视、送经设置、送经调整和送经补偿。
送经操作键:
F1——张力恢复。
F2——张力校零。
F3——从动卷曲。
F4——正向送经。
F5——终止操作。
F6——反向送经。
F11——连锁按钮。
F8+F10+F12——运行方式切换,仅允许在“送经监视”的运行画面上进行操作。
2.指定功能键说明
送经监视:显示基本信息和工作状态。
送经设置:基本参数的设置。
送经调整:为消除纬档进行的参数设置。
送经补偿:调整稀密档。
(五)其他电子送经装置
除前述的电子送经装置外,还有CE电子送经装置、A.V.R电子送经装置。
这些装置大多采用高性能的16位CPU和A/D转换器,可高精度控制张力。通过LCD显示器和触摸按键进行各种设定,并具有外接显示器接口。其基本特征如下:
织机停车后再启动时,为避免稀档发生,可控制织口在最合适的位置,即可先根据织物种类,进行倒转试验,找出最佳数据,此倒转量可适应停车时问的长短分为7个阶段来设定。
特殊的设计,使经纱的张力与经轴直径变化无关,保证经纱张力始终处于恒定状态。
伺服电动机可以在1/100 s内进行O~3000 r/min的加速。
正转、倒转量:0~110 mm。
卷经设定(换轴时)15≤经轴卷径≤100。
其预流工作图如图3—57所示。
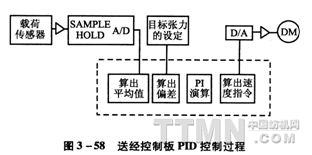
送经控制板的PID控制过程见图3—58。它是由单片机系统通过A/D电路检测过程y,并计算误差e=u—y和控制变量u,通过D/A变换后输出到执行机构(伺服电动机),使过程变量y稳定在设定值上。这种控制是根据采样时刻的误差值计算控制变量u的,是一种采样控制。
五、光电探纬装置
喷水织机使用高压放电探纬装置在织造加捻织物时,对水质有相当高的要求,需投资一套水源净化降低导电率设备,使得喷水织机在织物适应性上受到限制。光电探纬装置可解决该问题。
光电探纬装置采用国际广泛使用的SMD元件、光导纤维等先进器件,使产品具有体积小、故障率低、工作可靠的特点。
1.原理简介
本装置使用具有光导纤维的探头检测纬丝,探制装置将检测信号进行放大处理,同时与织机的探纬角度信号进行比较,从而将停机或运转信号送给织机的主控制板完成探纬检测。
2.面板示意图(图3—59)
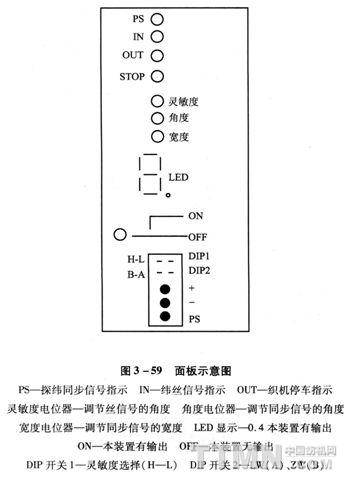
3.调试
(1)将DIP开关2调至位置A,并将织机同步接近开关位置为270°一320°左右。
(2)灵敏度调节:关掉探纬开关,启动织机,调节灵敏度电位器,使LED数码管显示为5,然后反向调节1~2格。
(3)根据车速调节该电位器,400~600 r/min,一般调在11~12点钟左右。600~800 r/min,调在13~14点钟左右。
(4)角度电位器调节:
调节该电位器使LED显示为1或2(不建议调到3或4)。
(5)打开探纬开关,正运转织机。
注意:必须与机械配合调整,选择适当的水量、压力、喷射角,使LED显示数字稳定。
|








