
- [产品]-->H系列H2A伺服驱动器
- [产品]-->H系列H1A伺服驱动器
- [产品]-->E系列E10伺服驱动器
产品推荐
产品分类
友情链接


联系方式
- 联系人:肖小姐
- 邮 箱:market@co-trust.com
- 地 址:深圳市南山区西丽镇茶光路南侧1089号深圳集成电路设计应用产业园210
- 手 机:15112695257
- 电 话:0755-33985005-6031
- 传 真:0755-33985005-8893
- 网 址:http://www.co-trust.com


EM231热电偶PID模块
发布时间:2015-03-27

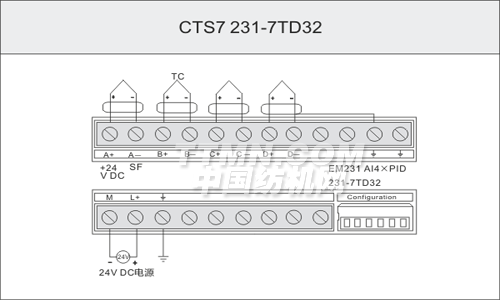
CTS7 231-7TD32:隔离型,4路J/K型热电偶输入模块,集成智能温控PID算法;
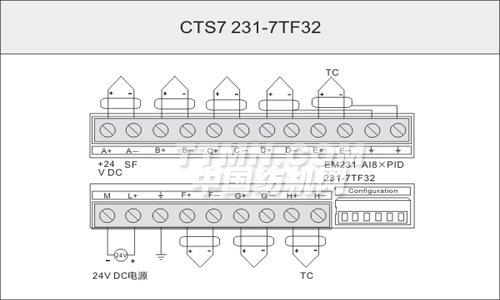
CTS7 231-7TF32:隔离型,8路J/K型热电偶输入模块,集成智能温控
概览:
主要特性
订货数据
功能特性:
规格参数
订货号
TrustPLC CTSC-200 EM231热电偶PID模块,4AI×TC PID
CTS7 231-7TD32
TrustPLC CTSC-200 EM231热电偶PID模块,8AI×TC PID
CTS7 231-7TF32
- 总线、电源、通道间全隔离,可靠性高,抗干扰能力强
- 16位采样精度,采用硬件滤波技术,测量值更加准确稳定
- 供电电源有反接保护和浪涌吸收功能,适用于恶劣的工业环境
- 集成先进的模糊逻辑控制算法,不占CPU资源,无需编程即可实现准确的温度控制,动态性能好
- PID控制输出可以是PWM或模拟量,双极性输出,可以控制加热和冷却
使用规范
- 应采用绝缘型热电偶以获得理想的抗干扰能力,提高可靠性
- 信号线应采用屏蔽线,屏蔽线需单端接地
- 在系统有良好接地的情况下模块的接地端应接到地线上,否则不接地
- 未使用到的通道请短接以消除断线故障告警
|
特性 |
EM231 4AI×TC PID |
EM231 8AI×TC PID |
|
物理特性 |
||
|
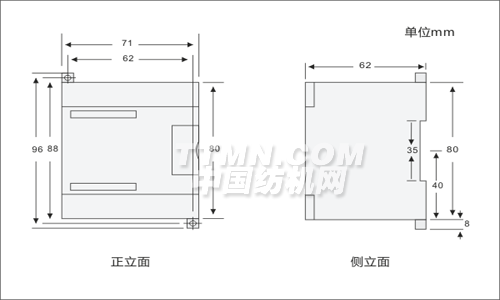
尺寸(宽×高×深) |
71.2×80×62mm |
71.2×80×62mm |
|
功耗 |
1.8W |
1.8W |
|
电源损耗 |
||
|
+5V DC消耗电流 |
54 mA |
54 mA |
|
L+ |
34 mA |
39 mA |
|
L+线圈电压范围 |
20.4~28.8V DC |
|
|
LED灯指示 |
24V DC电源供电良好ON=无错,OFF=无24V DC电源,SF:ON=模块故障,闪烁=输入信号错误,OFF=无错 |
|
|
模拟量输入特性 |
||
| 输入类型 | 悬浮型热电偶 | |
| 输入范围 | K型热电偶 | |
| 输入点数 | 4 | 8 |
| 隔离 | ||
|
现场至逻辑 现场至24V DC 24V到逻辑 |
500V AC 500V AC 500V AC |
|
|
共模输入范围 (输入通道至输入通道) |
120V AC | |
|
共模抑制
|
>120dB@120V AC | |
| 输入分辨率 | ||
|
温度
电压
|
0.1℃/0.1℉ 15位加符号位 |
|
| 测量原理 | Sigma-Delta | |
| 模块更新时间(所有通道) | 425ms | 825ms |
| 到传感器的导线长度 | 最大100米 | |
| 导线回路电阻 | 最大100Ω | |
| 噪声抑制 | 85dB@ 50Hz/60Hz/400Hz | |
| 数据字格式 | 电压:-27648至+27648 | |
| 输入阻抗 | >1MΩ | |
| 最大输入电压 | 30V DC | |
| 分辨率 | 15位+符号位 | |
| 输入滤波衰减 | -3dB@ 21kHz | |
| 基本误差 | 0.1% FS(电压) | |
| 重复性 | 0.05% FS | |
| 冷接点误差 | ±1.5℃ | |
| 诊断程序 | LED:EXTF,SF | |
|
PID特性 |
||
| PID算法 | PID+FUZZY参数自调整 | |
| 采样时间 | 1秒 | |
| 输出最小脉宽 | 10ms | |
| PID类型 | P、PI、PD、PID型 | |
| PID输出类型 |
模拟量或PWM脉宽控制
|
|
| PID输出极性 |
双极或单极
|
|
PID地址与参数配置
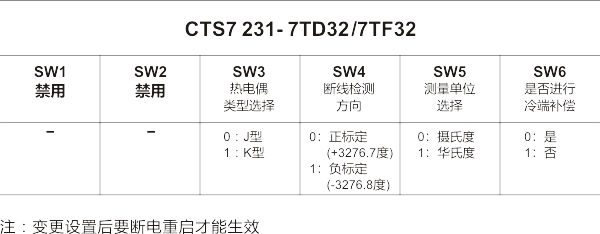
配置设置:
PID地址计算公式
|
地址名称 |
计算公式 |
备注 |
|
PID参数地址 |
A=(2048+S*256)+16*C |
S为模块所在的槽号(范围:0~6) C为通道号, 231-7TF为0~7,231-7TD为0~3 |
|
PID正向脉冲输出地址 |
X=(2048+S*256)+12 |
|
|
PID负向脉冲输出地址 |
Y=(2048+S*256)+13 |
PID参数输出部分(模块到CPU)
|
内容 |
地址 |
数值设置范围 |
实际对应数值 |
|
实际温度 |
VW A |
-2000~13000 |
-200~1300度 |
|
状态字 |
VW A+2 |
|
|
|
PID模拟量输出 |
VW A+4 |
-32000~32000 |
|
PID参数输入部分(CPU到模块)
|
内容 |
地址 |
数值设置范围 |
实际对应数值 |
|
设定温度 |
VW A+128 |
-2000~13000 |
-200~1300度 |
|
控制字节 |
|
VB A+130位等于0时 |
VB A+130位等于1时 |
|
V( A+130).0 |
PID不运行,没输出 |
PID运行 |
|
|
V( A+130).1 |
积分一直起作用,比例系数Kp不自动调整 |
积分分离及比例系数自动调整 |
|
|
V( A+130).2 |
PID单极输出,0~32000 |
PID双极输出,-32000~32000,具有加热和冷却功能 |
|
|
V( A+130).3 |
未使用 |
||
|
V( A+130).4 |
积分起作用 |
积分不起作用 |
|
|
V( A+130).5 |
微分起作用 |
微分不起作用 |
|
|
V( A+130).6 |
实际温度值滤波,抗干抗更强 |
实际温度值不滤波 |
|
|
PID脉冲输出周期设定 |
VW A+132 |
1~255 |
1~255秒 |
|
Kp(比例系数) |
VW A+134 |
0~9999 |
0~999.9 |
|
Ti(积分时间) |
VW A+136 |
0~3600 |
0~3600秒 |
|
Td(微分时间) |
VW A+138 |
0~3600 |
0~3600秒 |
正向脉冲输出地址
|
0通道脉冲输出 |
V X.0 |
|
1通道脉冲输出 |
V X.1 |
|
2通道脉冲输出 |
V X.2 |
|
3通道脉冲输出 |
V X.3 |
|
4通道脉冲输出 |
V X.4 |
|
5通道脉冲输出 |
V X.5 |
|
6通道脉冲输出 |
V X.6 |
|
7通道脉冲输出 |
V X.7 |
负向脉冲输出地址
|
0通道脉冲输出 |
V Y.0 |
|
1通道脉冲输出 |
V Y.1 |
|
2通道脉冲输出 |
V Y.2 |
|
3通道脉冲输出 |
V Y.3 |
|
4通道脉冲输出 |
V Y.4 |
|
5通道脉冲输出 |
V Y.5 |
|
6通道脉冲输出 |
V Y.6 |
|
7通道脉冲输出 |
V Y.7 |
应用举例
计算第二个扩展模块上的231-7TF的最后一个PID回路的地址。
首先计算地址:
S=1,C=7
A =2048 + 1 * 256 + 16 * 7 = 2416
X = 2048 + 1 * 256 + 12 = 2316
Y = 2048 + 1 * 256 + 13 = 2317
然后根据以下参数地址说明设定或读出参数内容:
VW2544 //设定温度
VB2546 //控制字(参数自调整、双极输出)
VW2548 //脉冲输出周期
VW2550 //Kp比例系数
VW2552 //Ti积分时间(秒)
VW2554 //Td微分时间(秒)
VW2416 //实际温度
VW2418 //状态字
VW2420 //PID模拟量输出
V2316.7 //正向脉冲输出
V2317.7 //负向脉冲输出
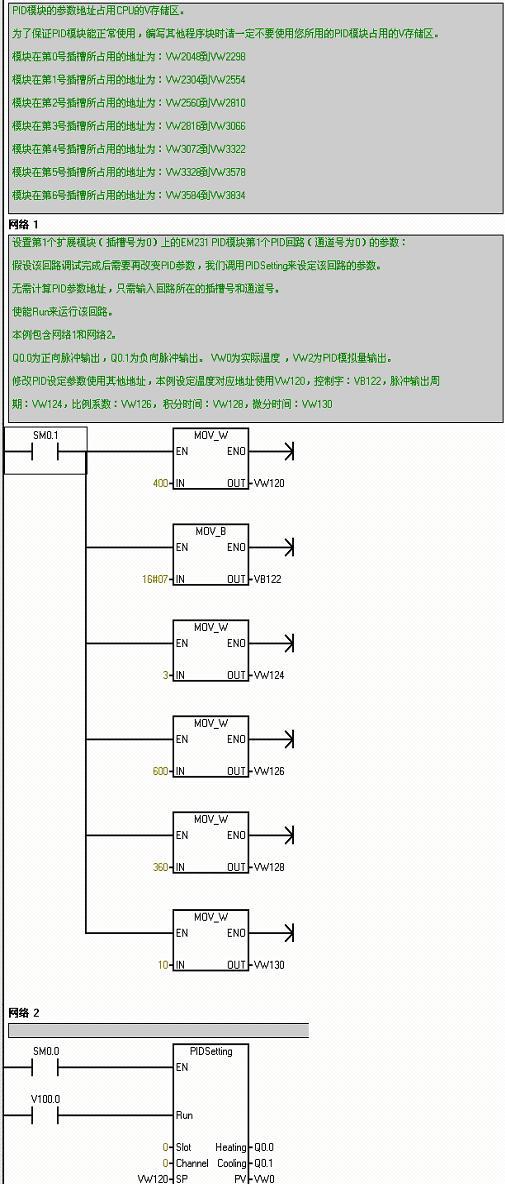
为了保证PID模块能正常使用,编写其他程序块时请一定不要使用您所用的PID模块占用的V存储区。
模块在第0号插槽所占用的地址为:VW2048到 VW2298
模块在第1号插槽所占用的地址为:VW2304到 VW2554
模块在第2号插槽所占用的地址为:VW2560到 VW2810
模块在第3号插槽所占用的地址为:VW2816到 VW3066
模块在第4号插槽所占用的地址为:VW3072到 VW3322
模块在第5号插槽所占用的地址为:VW3328到 VW3578
模块在第6号插槽所占用的地址为:VW3584到 VW3834
可调用EM231 PID专用的参数配置程序库
参数配置LADDER图如下:
接线图: